阿里巴巴
阿里巴巴 淘寶
淘寶 返回
返回
- 關于塑料螺絲 ,你真的了解嗎 2023-07-14
- 緊固件基礎知識FAQ(四)| 你一定要了解的8個緊固件基本常識 2023-07-03
- 法士威2023年第二季度工作總結Party圓滿落下帷幕 2023-07-01
- 法士威2023第一季度工作總結 part,圓滿收官 2023-04-02
文章出處:螺絲百科 網責任編輯: 法士威精密零件 閱讀量: 發表時間:2024-01-19
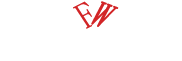
如上圖所示:施加扭矩旋轉螺栓后,螺桿受力伸長了,螺桿伸長產生夾緊力把連接件夾緊了。我們知道,施加的扭矩并不像夾緊力那么簡單,在通用公式中:力(F)*力矩(L)=扭矩M
也就是說螺栓旋轉的越多,得到的扭矩越大。但是90%扭矩被摩擦力消耗掉了,只有10%轉化為了夾緊力。打個比方,當你上緊一顆工藝要求為10N·m力矩的螺栓時,我們真正需要的是那1N·m軸向力矩,大多數力矩都被摩擦力消耗掉了。
摩擦力和夾緊力是什么關系呢?通常情況下,遵循50-40-10原則,就是50%的螺栓頭下摩擦力,40%的螺紋副中摩擦力,10%的夾緊力。但是在一些條件下夾緊力的比例是可以變化的。 試想我們需要螺桿伸長而產生夾緊力,扭矩越大螺桿可以伸的越長,是不是扭力越大越好呢?我們施加的扭矩越大會使螺栓過度伸長,螺栓超過屈服強度極限就會發生應力斷裂,從而失去了螺栓的連接作用。 在實際工作中,不論是兩被連接體間的壓緊力還是螺栓上的軸向預緊力,均很難檢測,也就很難予以直接控制,因而,人們采取了下述幾種方法予以間接控制。
扭矩控制法
扭矩控制法是最初始也是最簡單的控制法,它是基于螺紋連接時,軸向夾緊力F擰緊時與擰緊扭矩T成正比關系,可用一個公式T=K·F來表示,這個K則是扭矩系數。當一個螺釘設計出來時候他的軸向夾緊力F就是可知的,擰緊扭矩T通過工藝設定我們的擰緊扭矩也被工藝部門規范下來。但是總裝車間經常出現擰緊扭矩達到但是裝配的螺栓依然不合格,這是為什么呢?
關鍵就在這個扭矩系數,扭矩系數K的變化主要波動因素是綜合摩擦系數u,也就是說螺栓,螺孔的精度,雜質,是否磕碰都會影響這個綜合摩擦系數u。而且這個K值和溫度也有關系,經過日本住友公司通過實驗證明環境溫度每增加1℃,扭矩系數K就下降0.31%。扭矩控制法到底是否精確呢?給大家加深下影響,根據德國工程師協會擰緊實驗報告稱當擰緊力矩T的誤差為±0時(即無誤差施加扭矩)螺栓軸向夾緊力誤差可以達到±27.2%。
應用步驟: ◆直接或間接控制地加載扭矩 ◆實際目標扭矩通常是屈服扭矩的50% to 85% ◆用在拴緊彈性區域 ◆90%的加載扭矩用于克服摩擦力 ◆預緊力正確度±25% 扭矩控制法的優點是:成本低,可以使用簡易的擰緊工具扭矩扳手來檢查擰緊質量。 其缺點就是:擰緊精度不夠,不能充分發揮材料潛力,環境影響大(溫度,螺栓螺紋,雜質、磕碰等)。
扭矩-轉角控制法(TA)又稱超彈性控制法
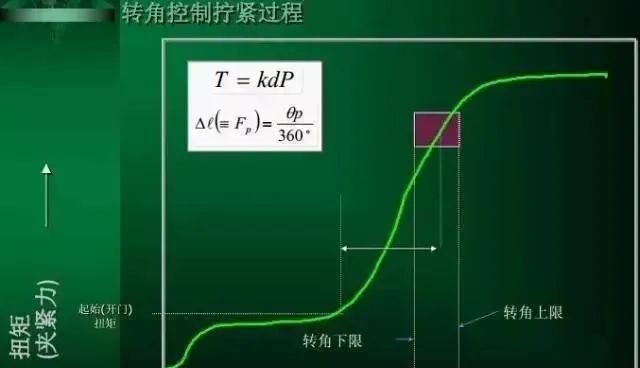
扭矩-轉角控制法是先將螺栓擰到一個不大的扭矩,一般會是擰緊力矩的40%-60%(由工藝驗證后制定),再從此點開始,擰一個規定的轉角的控制方法。
這種方法它是基于一定的轉角,是螺栓產生一定的軸向伸長及連接件被壓縮了。這樣做的目的是將螺栓擰到緊密接觸面上,并克服了一些表面凹凸不平等不均勻因素,而后面所需求的軸向夾緊力由轉角產生。在計算轉角之后,摩擦阻力對軸向夾緊力的影響不復存在,所以其精度比單純的扭矩控制法要高,扭矩控制法的要點就是測量轉角的起點,一旦這個轉角確定下來我們就可以獲得相當高擰緊精度。
由于有了比較先進擰緊方法于是產生了一種適應生產力的工具,就是電動擰緊工具,它是由電機—驅動齒-彎頭齒輪-傳感器等構成,可以相對比較容易的設定預警力矩及起始轉角。
應用步驟: ◆應用一個固定扭矩 (起始(開門)扭矩) ◆轉動扣緊件到達預定轉角 ◆離屈服擰緊的最初階段, 此刻也用在彈性區域。 ◆需要用試驗確定起始(開門)扭矩與轉角參數 ◆預緊力正確度±15% 扭矩-轉角控制法(TA)優點:擰緊精度高,可以獲得較大的軸向夾緊力。 缺點:其控制系統比較復雜,需要測量預緊扭矩及轉角2個數據,質量部門不易找出適當的方法對擰緊結果進行檢查跟進。
屈服點控制法(TG)

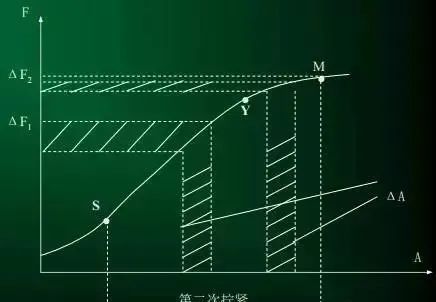
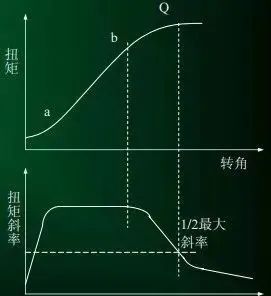
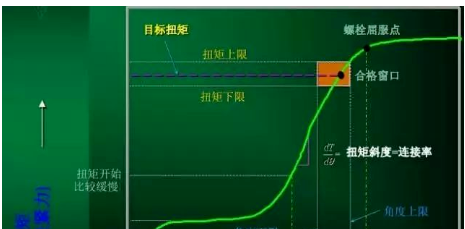
通過上面夾緊力圖即可看出,同樣的轉角誤差在其朔性區的螺栓軸向預緊力誤差ΔF2比彈性區的螺栓軸向預緊力誤差ΔF1要小得多。屈服點控制法就是把螺栓擰緊至屈服點后,停止擰緊的一種方法。它是利用材料屈服的現象而發展起來的一種高精度的擰緊方法。這種控制方法,是通過對擰緊的扭矩/轉角曲線斜率的連續計算和判斷來確定屈服點的。
螺栓在擰緊的過程中,其扭矩/轉角的變化曲線見扭矩、扭矩斜率對比圖。真正的擰緊開始時,斜率上升很快,之后經過簡短的變緩后而保持恒定( a_b區間)。過b點后,其斜率經簡短的緩慢下降后,又快速下降。當斜率下降一定值時(一般定義,當其斜率下降到最大值的二分之一時),說明已達到屈服點(即扭矩對比圖中的Q點),立即發出停止擰緊信號。屈服點控制法的擰緊精度是非常高的,其預緊力的誤差可以控制在±4%以內,但其精度主要是取決于螺栓本身的屈服強度。
◆扭矩與轉角是在擰緊中受到監控 ◆當一點最大值梯度下降時來判別最大梯度與屈服點 ◆利用最大壓緊力潛能 ◆摩擦力未減小 ◆允許每次擰緊的觀察扭矩轉角 ◆螺栓不能再使用 ◆預緊力正確度±8%
落座點—轉角控制法 (SPA)
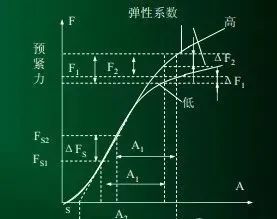
落座點—轉角控制法是最近新出現的一種控制方法,它是在扭矩-轉角T-A法基礎上發展起來的。TA法是以某一預扭矩Ts為轉角的起點,而SPA法計算轉角的起點,采用扭矩曲線的線性段斜率與轉角A坐標的交點S(見圖)。
圖中F1是TA法最大螺栓軸向預緊力誤差,F2是SPA法最大螺栓軸向預緊力誤差。從圖中可見,采用TA法時,由于預扭矩TS的誤差(ΔTs=Ts2-Ts1,對應產生了螺栓軸向預緊力誤差ΔFs),在轉過相同的轉角A1后,相對于兩個彈性系數高低不同的擰緊工況,其螺栓軸向預緊力誤差為F1;即使是彈性系數相等的,但由于ΔTs 的存在,也有一定的誤差(見圖中的ΔF1、ΔF2)。
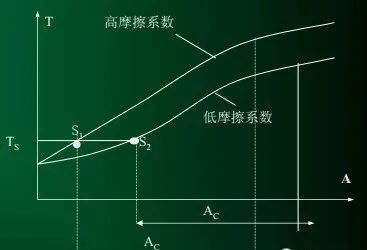
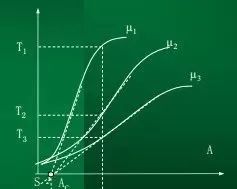
如若采用SPA法,由于是均從落座點S開始轉過A2轉角后,相對于兩個彈性系數高低不同的擰緊工況,其螺栓軸向預緊力誤差為F2。顯然F2小于F1,即落座點—轉角控制法擰緊精度高于扭矩-轉角控制法。采用SPA法,摩擦系數大小對于螺栓軸向預緊力的影響幾乎可以完全消除,下一圖為擰緊中不同摩擦系數所對應的扭矩-轉角關系曲線。圖中摩擦系數:μ1>μ2>μ3。
雖然不同的摩擦系數所對應的扭矩-轉角關系曲線的斜率不同,但其落座點(曲線線性段的斜率與橫軸的交點)相差不大。故從此點再擰一個角度Ac,不同摩擦系數對螺栓軸向預緊力的影響基本可以消除。
SPA法與TA法比較,其主要優點是:能克服在Ts時已產生的扭矩誤差,因此,可以進一步提高擰緊精度。
螺栓伸長法(QA)
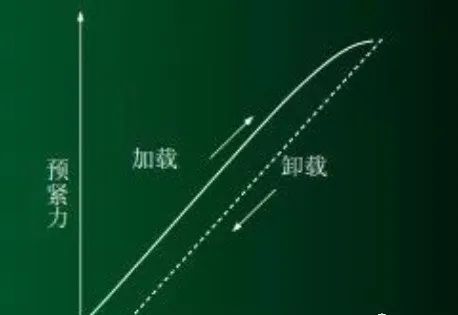
QA法是通過測量螺栓的伸長量來確定是否達到屈服點的一種控制方法,雖然每一個螺栓的屈服強度不一致,也會給擰緊帶來誤差,但其誤差一般都非常小。在QA法中所采取的測量螺栓伸長量的方法,一般是用超聲波測量,超聲波的回聲頻率隨螺栓的伸長而加大,所以,一定的回聲頻率就代表了一定的伸長量。
圖示就是QA法的原理,由于螺栓在擰緊和擰松時,用超聲儀所測得的回聲頻率隨螺栓的擰緊(伸長)和擰松(減小伸長量)而發生變化的曲線并不重合,同一螺栓軸向預緊力的上升頻率低于下降頻率。這樣,在用來測量螺栓的屈服點時應予以注意。
扭矩斜率法
扭矩斜率法是以扭矩-轉角曲線中的扭矩斜率值的變化作為指標對初始預緊力進行控制的一種方法。該擰緊方法通常把螺栓的屈服緊固軸力作為控制初始預緊力的目標值。該擰緊方法一般在螺栓初始預緊力離散度要求較小并且可最大限度地利用螺栓強度的情況下使用。
但是由于該擰緊方法對初始預緊力的控制與塑性區的轉角法基本相同,所以,需要對螺栓的屈服點進行嚴格的控制。該擰緊方法與塑性區的轉角法相比,螺栓的塑性即反復使用等方面出現的問題較少,有一定的優勢,但是,緊固工具比較復雜,也比較昂貴。